Térképi algebráknak nevezzük általános értelemben a két vagy több bemenő kép megfelelő pixeleivel végrehajtható matematikai műveleteket, melyek eredménye egy újabb kép lesz. Pl. (infravörös sáv) - (vörös sáv), másképpen DNir(x,y) - DNr(x,y) művelet alkalmas a vegetáció jelenlétének kimutatására.
Bonyolultabb kifejezéseket is értelmezhetünk, mint pl. a Tasseled Cap számítás, mely a Landsat TM 6 sávját is felhasználja a számításban.
Hányados is képezhető, pl. TM5/TM7 (agyagásvány index).
A normalizált vegetációs index (NDVI) kivonás, összeadás, és osztás után jön létre: (IR-R)/(IR+R)
Egyszerű trigonometrikus függvények is használhatók, pl. a következő számítással a pixelértékeket egy 0-255 intervallumba transzformálhatjuk: DN out : 162.34(atan(DN1xy)/(DN2xy))
A multispektrális űr- és légifelvételek különböző sávjait megjeleníthetjük, ha definiálunk egy N-dimenziós teret, ahol N a sávok száma. Az N-dimenziós teret, ha a sávok a különböző spektrális tartományokat jelentik, N-dimenziós spektrális (adat)térnek nevezzük. Minden pixelt a sávok szerinti pixelérték alapján (N db koordináta) pozícionálhatunk ebben a térben. A pixelek spektrális térbeli pozícióját a pixel által reprezentált földrajzi területegység reflektancia, abszorpciós tulajdonságai határozzák meg. Az adatok ebben az N-dimenziós térben elemezhetők, struktúrájuk vizsgálható. Az adatstruktúra térbeli határait többféleképpen meghatározhatjuk, a befoglaló test lehet téglatest, gömb, ellipszoid, mind természetesen ebben az N-dimenziós térben értelmezve (pl. hiperellipszoid). Ezen testek főátlói nem szükségszerűen illeszkednek az adattér tengelyeire. E sajátosság jobb megjelenítése érdekében előnyösebb, ha az N-dimenziós teret kifeszítő tengelyeket forgatjuk úgy, hogy egy vagy két adatstruktúra tengely illeszkedjen a képi megjelenítő X és Y tengelyére. Így láthatóvá válhat az a tengely, ahol az abszorpciós csúcsok legjobban kifejezik a speciális vizsgálat szempontjából fontos tulajdonságokat. Pl. geológiai, növénytani szempontból érdekesek lehetnek a különböző abszorpciós tulajdonságok. Tasseled Cap transzformáció megadja a lehetőséget az adatok jobb megjelenítésére, pl. a vegetáció vizsgálata érdekében. Az első ilyen transzformációt Landsat MSS négysávú képekre alkalmazták (Kauth-Thomas, 1976). A négydimenziós spektrális térben az általuk vizsgált terület „talajait” reprezentáló pixelek egy hosszan elnyújtott ellipszoidban helyezkedtek el. Ha kiválasztottak két sávot, akkor az ellipszoid képe a sávok által kifeszített síkra vetült és az ellipszoid tengelyei a vetítés miatt jelentősen lerövidültek. Az alkalmazott transzformációval (elforgatás, skálázás) az adatszerkezetről sokkal jobb képet kaptak. Ők nevezték el a transzformációt Tasseled Cap transzformációnak, ami magyarul bojtos sapkát jelent, mert a vegetációt reprezentáló pixelek által meghatározott adatstruktúra formája a növekedési fázis különböző szakaszaiban egy bojtos sapkához volt hasonló. A kutatások során (Kauth-Thomas, 1976,Crist et al 1986, Crist et Kauth 1986) három adatstruktúra tengelyt határoztak meg, melyek háromféle vegetációval kapcsolatos tulajdonságot adnak meg.
Brigthness (visszaverő, fényességi index) - a hat TM sáv súlyozott összege, a talaj-reflektancia változását mutatja
Greenness (zöld index) - merőleges a brightness tengelyre, a közeli infravörös és a vörös sávok közötti kontrasztot mutatja. Szoros kapcsolatban van a képen található zöldfelületek összterületével.
Wetness (nedvességi) - kapcsolatban van a lombkorona és a talaj nedvességtartalmával (Lillesand and Kiefer 1987).
Az eredeti tengelyelnevezések (Kauth-Thomas, 1976) a Brightness, Greenness, Yellowness, és a Nonesuch voltak. Az MSS képeknél használt brightness index nem korrelált a TM szenzorra bevezetett brightness értékkel, míg a greenness index jól korrelált az új szenzor greenness index értékével. Ezek a tengelyelforgatások mind szenzorfüggők, de a legtöbb szenzorra már meghatározták korábban, pl. Landsat 4 TM, 5 TM. Ugyanazokat a forgatásokat alkalmazhatjuk ugyanazzal a szenzorral készített különböző képek esetén. A Landsat MSS 4 sávjára kidolgozott módszert a TM 7 sávja miatt ki lehetett egészíteni (nőtt a dimenzió száma) újabb tengelyekkel. Ezek sorrendben Haze (homályosság), Ötödik, Hatodik tengely. Laurin (1986) a homályossági paramétert alkalmazta egy algoritmusban a Landsat felvételek homályosságának csökkentésére.
A Landsat MSS, TM4 és TM5 szenzorokra alkalmazott együtthatók és műveletek rendszere:
Brightness = 0.3037(TM1) + 0.2793(TM2) + 0.4743(TM3) + 0.5585(TM4) + 0.5082(TM5) + 0.1863(TM7)
Greenness = -0.2848(TM1) - 0.2435(TM2) - 0.5436(TM3) + 0.7243(TM4) + 0.0840(TM5) - 0.1800(TM7)
Wetness = 0.1509(TM1) + 0.1973(TM2) + 0.3279(TM3) + 0.3406(TM4) - 0.7112(TM5) - 0.4572(TM7)
Haze = 0.8832(TM1) - 0.8190(TM2) - 0.4580(TM3) - 0.0032(TM4) - 0.0563(TM5) + 0.0130(TM7)
A brightness érték a hat sáv súlyozott értékeinek függvénye, a greenness érték a látható vörös és az infravörös kontrasztjától és egy kissé a 5. és a 7. sáv értékétől függ. A wetness értékét legjobban a közepes infravörös sávok közötti kontraszt befolyásolja, valamint kevésbé a vörös és a közeli infravörös sáv értéke. A három első Tassalled Cap paraméter alapján definiálhatunk egy 3-dimenziós teret, amelyben a térbeli pozíciót a megfelelő együtthatók segítségével kiszámított Br, Gr, We értékek, mint koordináták határozzák meg. A Br és a Gr értékekkel meghatározott síkot Crist és Cicone (1984) után a „vegetáció síkjának”, míg a Br és a We értékekkel meghatározott síkot a „talajok síkjának” nevezzük. A Tassalled Cap alkalmazásakor nem szabad megfeledkezni néhány problémáról. Bár a transzformáció együtthatói a priori értékek, ellentétben a főkomponens analízis együtthatóival, az értékek kívül esnek a 0-255 intervallumon. A probléma olyan módszer találása, amely elvégzi az értékek ezen intervallumba való transzformálását anélkül, hogy a képek összehasonlításának a lehetőségét elveszítenénk. Crist szerint mezőgazdasági területeken a Br értéke 0-350, a Gr -100,125, a We -150, 75 között változik. Ha képek közötti összehasonlítás fontos, akkor az értékeket skálázhatjuk ezen határokkal. A másik probléma a különböző időpontban készített felvételek TC képeinek az összehasonlításának a korlátja a változó besugárzási feltételek és az atmoszféra összetételének változása miatt. A harmadik probléma, hogy a TC transzformációban a Br tengely (talaj tengely a PVI terminológiában) meghatározásakor szükséges együtthatókat empirikus adatok szerint adták meg. Ezek az adatok az MSS képek esetén kis számú mintából származnak egy Illinois állambeli megye területéről (Fayette County), míg a TM-re megadott TC együtthatókat szintén észak-amerikai talajok reflektancia tulajdonsága alapján adták meg. Ezért a TC együtthatók alkalmazása a Föld más területén lévő talajtípusokra vonatkozóan nem biztos, hogy sikeres lesz, mert az együtthatókkal meghatározott Br tengely pozíciója nem biztos, hogy illeszkedik a vizsgált terület talajainak reflektancia-tulajdonságai alapján számítható Br tengellyel.
Amíg a radiometrikus finomítás minden pixelt önállóan kezelt, addig a térbeli finomítás a pixel értékét aszerint változtatja meg, hogy milyen értéket vesznek fel a szomszédos pixelek. A térbeli finomítás során nagy szerepet kap az un. térbeli gyakoriság, mely kifejezi, hogy mekkora a különbség a legkisebb és a legnagyobb pixelérték között a pixelek egy halmazára vonatkoztatva. Jensen (1986) szerint a térbeli gyakoriság a „intenzitás értékek adott távolságon belüli különbségét jelenti a kép bármely részletére kiszámítva”. Eszerint a, nulla térbeli gyakoriság- olyan kép, amelyben minden pixelérték egyforma, b, alacsony térbeli gyakoriság - a pixelértékek folyamatosan változnak, c, nagy térbeli gyakoriság - a kép sakktáblaszerűen tartalmaz alacsony és magas értékű pixeleket.
Konvolúciós szűrő
A konvolúciós szűrés a pixelek általában kis halmazára értelmezett képátalakítási folyamat, mely megváltoztatja a térbeli gyakorisági tulajdonságait. A konvolúciós szűrést egy konvolúciós kernel, mátrix végzi. Az általában páratlan számú oszlopot és sort tartalmazó (2k+1 * 2k+1) mátrix elemeit koefficienseknek, együtthatóknak nevezzük. A konvolúciós kernelt úgy használjuk a szűrés során, hogy a kép minden egyes pixele egyszer a kernel közepére kerül és ennek a pixelnek az új értéke az önmaga és a szomszédos pixelek értékeiből a mátrix együtthatóival képzett súlyozott átlaga lesz.
A konvolúciós formula
A következő formula határozza meg általános értelemben a kimenő adatfile értékét a szűrés után a bemenő, a kernel közepén elhelyezkedő pixelre vonatkozóan:
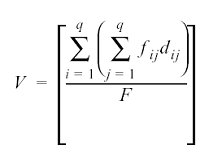
ahol
fij = a konvolúciós kernel i sorának j oszlopában lévő együttható
dij = a pixel értéke
q = a kernel mérete, négyzet alakú kernelt feltételezve
F = vagy az együtthatók összege, vagy 1, ha az összeg 0
V = a kimenő pixel érték
Amennyiben a kimenő pixelérték nullánál kisebb, akkor a V értéke 0 definíció szerint.
Nulla-összegű kernelek
Nulla-összegűnek nevezünk egy kernelt, ha a benne lévő együtthatók összege nulla. Amennyiben nulla összegű kernelt használunk az együtthatók összegét nem használhatjuk a konvolúciós formulában. A nullával való osztás miatt az F értéke ebben az esetben 1 lesz. Emiatt a kimenő érték: •0 olyan területen, ahol minden bemenő érték azonos,
•kicsi, ha a térbeli gyakoriság alacsony,
•nagy, ha a térbeli gyakoriság magas.
Ezért a nulla-összegű kerneleket élkiemelőknek nevezzük. Alacsony térbeli gyakoriságú területeken a pixelértékeket kisimítja vagy nullává változtatja, és éles határt jelöl ki ott, ahol a térbeli gyakoriság magas, vagyis két homogén pixelhalmaz közé. A nulla-összegű kerneleket megadhatjuk úgy, hogy bizonyos irányú határokat jelöljenek ki.
A következő 3x3-as kernel a déli határt jelzi:
-1-1-1
1 -2 1
1 1 1
High frequency kernelek
A high frequency kernelek, vagy a high pass kernelek hatására megnő a térbeli gyakoriság. A high frequency kernelek mint élkiemelők megerősítik a homogén területek közötti határokat. Amíg az élkiemelő (mint a nulla-összegű) kernelek úgy emelik ki a határt, hogy a többi formát eltüntetik, addig a high pass kernelek meghagyják azokat. Pl.
-1 -1 -1
-1 16 -1
-1 -1 -1
Ez a kernel a környezetéhez képest alacsony értékű pixelt tovább csökkenti, illetve a környezetéhez képest magas pixelértékű pixel még nagyobb lesz, vagyis a térbeli gyakoriság tovább nő.
Low-frequency kernelek
A low-frequency kernelek, vagy low-pass kernelek csökkentik a térbeli gyakoriságot.
1 1 1
1 1 1
1 1 1
A fenti kernel átlagolja a pixelértékeket, így a térbeli különbségek csökkennek, a térbeli homogenitás nő. A kép finomabb lesz.
A folyamatos rétegek konvolúciós szűréséhez hasonló a tematikus rétegek filterezése. A szűrés itt is a középen elhelyezkedő pixelt körülvevő szomszédos pixelek értékei alapján történik, ezért nevezik szomszédsági elemzésnek is. A szomszédos pixelek halmazát egy pásztázó ablak alapján adhatjuk meg, mely lehet kör, ellipszis, négyzet vagy akár szabálytalan alakú is. A pixelértékeken végrehajtott műveletet fokális műveletnek is nevezzük. A tematikus rétegből új tematikus réteg jön létre az alábbi műveletek szerint:
a, határ - kijelöli az osztályok közötti határokat. A kimenő réteg csak a határon lévő pixeleket tartalmazza.
b, sűrűség - a kimenő pixelérték jelzi, hogy a középen elhelyezkedő pixel értéke hányszor fordul elő a pásztázó ablakon belül. Méri a homogenitást az elemzett pixel szerint. Gyakran használják a vegetáció korona zártságának becslésére.
c, diverzitás - a kimenő pixelérték megadja a pásztázó ablakon belüli különböző osztályok számát. A diverzitás méri a heterogenitást.
d, majoritás - a kimenő pixelérték megadja a pásztázó ablakon belül legtöbbször jelenlévő osztály értékét. A művelet valójában egy low-frequency filter, amely kiszűri a „sószórás” szerű foltokat a képről.
e, maximum - a kimenő pixelérték a pásztázó ablakon belüli legnagyobb osztály értéke lesz. Ezzel a módszerrel a lineáris alakzatokat és a határokat el lehet tüntetni.
f, átlag - átlagolja a pixelértékeket. Amennyiben a pixelértékek mennyiségi adatokat jelentenek, akkor ez a szűrő egy konvolúciós szűrő. Minőségi adatokra (nominális és rang típusokra) nem alkalmazható.
g, médián - az ablakon belüli pixelek statisztikus e rendeli a középső pixelhez. Használható kvantitatív és kvalitatív adatokra is.
h, minoritás - a kimenő pixelérték megadja a pásztázó ablakon belül legkisebb számban jelenlévő osztály értékét. Ez a módszer alkalmas a legritkábban előforduló osztályok azonosítására, valamint a különálló lineáris alakzatok kijelölésére.
i, rang - megadja a középső pixel értékénél kisebb pixelértékű pixelek számát.
j, szórás - az ablakon belüli pixelek értékeinek a szórását határozza meg és rendeli a középső pixelhez.
k, összeg - a középső elem értéke az ablakon belüli pixelek értékeinek összege lesz. Amennyiben az osztályok közötti sorrend megállapítható, akkor az összegzés a pixelek további rangsorolását teszi lehetővé.
Vonal felismerés
Vonalszerű alakzatok, mint pl. folyók vagy utak a műholdfelvételeken két éles határvonallal lehatárolhatók, ha egy pixelnél szélesebben, de egy pixel széles alakzatok is felismerhetők a következő kernelek segítségével.
A megfelelő vonalfelismerő kernel választásához szükséges tudnunk, hogy milyen típusú vonalak vannak a képen és általában ismerni kell ezen típusok sajátosságait. A digitális képeken megkülönböztetünk: lejtős határvonalat, éles (lépcsős) határt, széles vonalat, keskeny vonalat. lejtős határvonal - a két homogén, de különböző értékű terület között fokozatos az átmenet, alacsony értékű terület felől a pixelértékek fokozatosan nőnek a nagyobb pixelértékű terület irányában. A lejtőszerű alakzat leírásakor megadható a „lejtő magassága” - a pixelértékek változásának mértéke, a lejtő szélessége pixelekben, és a lejtő középpontja. éles (lépcsős) határ - olyan lejtős határ, ahol a lejtő meredeksége 90°. széles vonal - a vonal mindkét oldalán enyhe vagy meredekebb lejtővel rendelkezik, a vonal szélessége kisebb mint a kernel oldalhossza. keskeny (tetőszerű) vonal - a vonal egy-két pixel szélességű. A modellek az elméleti, ideális határvonalakat mutatják be. A valós adatok esetében a határátmenetek nem ilyen finomak, ill. élesek, a pixelértékek kisebb-nagyobb ingadozásokkal érik el a másik területre jellemző értéket. Az élfelismerő algoritmusok között vannak első- és másodrendű derivált műveletek. Az elsőrendű derivált kernel az egyszerű Prewitt kernelből származik. A másodrendű derivált kernel a Laplace operátorból származik.