A képtranszformálás a digitális műholdfelvételek vagy a légifotók a szabálytalan földfelszín leképezései egy síkfelületre. Még a látszólag sík területekről készített felvételek is torzulnak a Föld görbülete és a szenzor fizikai tulajdonságai miatt. Ebben a fejezetben bemutatásra kerülnek azok a műveletek, melyekkel elvégezhető a kép geometriai korrekciója, a különböző időpontokban készített felvételek összevetése és a képek térképi tartalommal való feltöltése.
A térképi vetületek a gömb, ill. szferoid (pl. a Föld) felszínének síkvetületei. A gömb síkba fejtése mindig valamilyen torzulást eredményez. Ezért minden térképi vetületi rendszert a vetület torzulási sajátosságai szerint csoportosítva beszélhetünk távolságtartó, szögtartó és területtartó vetületről. Például a területtartó vetületeken adott területű körök mindig azonos területű felszíni területeket jelölnek. Bár a területek itt egyenlők, a területek alakjai, a szögek torzulhatnak. A vetületeken az adott hely pozícióját koordinátákkal adjuk meg. Minden vetületi koordináta rendszer átalakítható olyan hálózattá, amelyben a helyet X,Y (oszlop, sor) koordináták fejezik ki.
A rektifikáció, vagy képtranszformáció olyan folyamat, melyben az egyik hálózat adatát, elemét áttranszformáljuk egy másik hálózatba, valamilyen n-ed fokú polinom segítségével. Az átalakítás során legtöbbször az új képelem (pixel) nem illeszkedik tökéletesen az eredeti hálózatra, az új pixelértéket egy egyértelmű hozzárendelési szabály alapján kell kiszámítani. Ezt a folyamatot átmintázásnak (resampling) nevezik. Gyakran előfordul, hogy egy területről több különböző műszerrel készített kép áll rendelkezésünkre. A pixelenkénti összehasonlításhoz a képeket azonos hálózatba kell vinni. A képek átfedetéséhez nem mindig szükséges a térképi koordináta rendszer. Ezt a kép a képhez (image to image) átalakítást hozzáillesztésnek (registration) nevezzük. Ha a képi adatokat vetületi rendszerhez illesztjük, és vetületi koordinátákkal látjuk el, akkor a folyamatot geokódolásnak (georeferencing) nevezzük. A képtranszformáció definíció szerint tartalmazza a geokódolást is. A kép a képhez átalakítás csak akkor lesz geokódolás, ha az a kép rendelkezik térképi koordinátákkal, amelyhez a többi képet illesztjük.
Általában vonatkoztatási rendszer-nek nevezzük azt a hálózati- ill. koordináta-rendszert, amelyhez illesztjük az eredeti adatfile koordinátáit a képtranszformáció során. A képtranszformáció és a hozzáillesztés eljárásának általános lépései a következők:
A GCP-ok kiválasztása.
A transzformáció mátrixának kiszámítása és tesztelése.
Az output .img file létrehozása. A pixeleket át kell mintázni az új hálózathoz való illesztéshez.
A felszíni illesztési pontok (GCP) egy olyan felvétel meghatározott pixelei, amelyhez a megfelelő térképi koordináták - és egyéb output koordináták - ismertek. A GCP két (X,Y) koordináta párból állnak:
* forrás koordináták - a transzformált felvétel adat file koordinátái
* vonatkoztatási koordináták - azon térkép, vagy felvétel koordinátái, amelyhez a forrás felvételt hozzáillesztettük.
A helyes képtranszformáláshoz elengedhetetlen a GCP pontos megadása, mivel a transzformált kép összes többi pontja a GCP-ből extrapolálással áll elő. A képtranszformáció annál megbízhatóbb lesz, minél több szétszórt helyzetű pontot választunk a teljes felületről. A nagy méretarányú felvételeken választhatjuk GCP-nak pl. az útkereszteződéseket, repülőterek kifutópályáit, tornyokat, épületeket. Kis méretarányú képeken a nagyobb objektumok használhatók, mint pl. lakott területek, vagy geológiai formák, tereptárgyak. Ne használjunk fel olyan felszíni jegyeket, amelyek idővel megváltozhatnak, mint pl. tavak partvonalát, egyéb vízfelszíneket, növényzetet, stb.
A forrás file koordinátáinak transzformációjához polinomokat használunk. A felvétel torzultságától, a GCP számától és egymáshoz viszonyított elhelyezkedésétől függően összetett polinomok szükségesek a kellő transzformáció végrehajtásához. A kifejezések bonyolultságát a polinomok foka mutatja. A többtagú kifejezés legmagasabb kitevője adja meg a polinom fokát és a transzformáció fokát, pedig a polinom foka. Általában első- és másodfokú transzformációkat alkalmazunk.
Az első fokú transzformációt lineáris transzformációnak nevezzük. A lineáris transzformáció megváltoztathatja:
* X és/vagy Y koordináta helyét
* X és/vagy Y tengely mentén a méretarányt
* eltolást X,Y
* rotációt
Az elsőfokú transzformációkat a következő esetekben használjuk: nyers felvételek vetítése térképi vetületre; térképi síkvetület konvertálása más síkvetületbe és amikor viszonylag kis méretű képterületet transzformálunk. A lineáris transzformációt még a GCP kijelölése előtt végezzük el. A Landsat TM felvételt újratájolhatjuk, a deklináció szögének megfelelően elforgathatjuk a letapogatott négyzet alakú területet és beállíthatjuk a felvételt úgy, hogy az északi irány függőlegesen felfelé mutasson.
A elsőfokú transzformációt síkra vetített adatok transzformálására is használhatjuk. Pl. a SPOT és a Landsat Level 1B adatai már síkba transzformáltak, de még nem a kívánt vetületi rendszerbe. Amikor ezt a fajta transzformációt végezzük, és elsőre magas az RMS hiba, akkor nem tanácsos a transzformáció fokát növelni. Ilyen esetben először vizsgáljuk meg a GCP-et és ezek eloszlását, majd szisztematikusan küszöböljük ki a hibát.
Az elsőfokú transzformáció mátrixa hat együtthatót tartalmaz - mindkét (X,Y) koordinátához három tartozik: a1, a2, a3, b1,b2, b3 amelyekkel az elsőfokú polinom a következőképpen áll elő: x0=b1+b2xi+b3yi
y0=a1+a2xi+a3yi
ahol:
xi és yi a forrás koordináták (input)
x0 és y0 a transzformált koordináták (output).
Hány GCP-re van legalább szükség? A magasabb fokú transzformációkkal bonyolultabb torzulási problémák küszöbölhetők ki. Magasabb fokú transzformációkhoz azonban több GCP-re van szükség. Pl. három pont határoz meg egy síkot, ezért egy elsőfokú transzformációhoz - amelyet egy sík egyenletével fejezünk ki - legalább három GCP-re van szükség. Ugyanígy, egy harmadfokú transzformációt a paraboloid egyenlete ad meg, tehát legalább hat GCP-t kell kiválasztanunk. A t-ed-fokú transzformációhoz szükséges legkevesebb pont számát a következő formula adja meg:
(t+1)*(t+2)/2
A legtöbb esetben az összes GCP nagyon pontos illesztése szükségtelenül magas fokú transzformációt követelne. A fokszám növelése helyett megengedhetünk egy bizonyos nagyságú hibát. A kiszámolt transzformációs mátrix inverze visszatranszformálja a GCP referencia koordinátáit a forrás koordináta rendszerbe. Amennyiben a transzformáció fokát nem növeltük addig, hogy tökéletes legyen a pontok illeszkedése, a visszatranszformálás során kapott koordináták és a forrás koordináták között eltérés lesz tapasztalható. Az RMS hiba (root mean square) a GCP input helyének és a visszatranszformálás utáni helyének távolságát fejezi ki: ahol: xi és yi az input forrás koordináták xr és yr a visszatranszformált koordináták. Amennyiben a forrás koordináták az adat file koordinátái, akkor az RMS hiba pixel szélességben mért távolságot jelent. Pl. ha az RMS hiba értéke 2, akkor ez azt jelenti, hogy a referencia pixel 2 pixel távolságra van a visszatranszformált pixeltől.
A képtranszformációs/hozzáillesztési folyamat következő lépése az output file létrehozása. Mivel az input felvétel pixel-hálózata ritkán illeszkedik a referencia kép hálózatára, így ki kell számolni, hogy milyen intenzitás értéket kapjon az output felvétel megfelelő pixele. Ezt az eljárást nevezzük átmintázásnak.
6.9. ábra - Az átmintázás lépései (1), input kép az illesztőpontokkal, (2) az output kép, (3) a két háló egymásrafedve, (4) átmintásázi módszer alkalmazása (Erdas Field Guide)
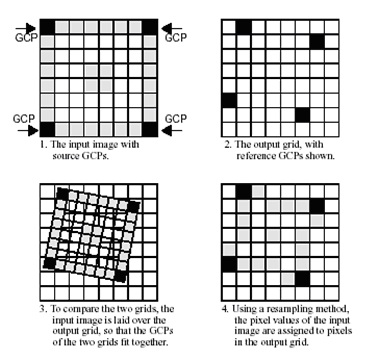 |
Általában a következő átmintázási módszerek használatosak:
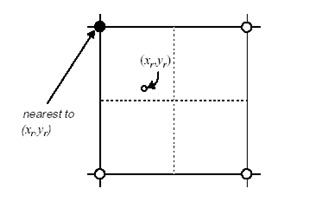
* Legközelebbi szomszéd (nearest neighbor) - Az output pixel értékének a legközelebbi pixel intenzitás értékét választjuk.
Egy output pixel legközelebbi szomszédjának meghatározásához a pixel transzformált (x0,y0) koordinátáit a transzformációs mátrix inverzének felhasználásával visszatranszformáljuk az eredeti (forrás) koordináta rendszerbe (xr,yr). Az a pixel lesz a legközelebbi szomszéd, amelynek a távolsága a legkisebb a visszatranszformált (xr,yr) koordinátától. E pixel intenzitás értéke lesz az output felvétel képpontjának keresett értéke.
Előnyei:
Az eredeti értékek átlagolása nélkül történik az átvitel, így nem vesznek el az extrém és finom értékek. Ez lényeges pl.a vegetációtípusok elkülönítésénél; határok, élek kijelölésénél; vagy egy tó eltérő hőmérsékletű ill. átlátszóságú területeinek meghatározásánál.
A klasszifikáció előtt használható.
A legkönnyebben és leggyorsabban kiszámolható a három módszer közül.
Hátrányai:
Amennyiben ezt a módszert alkalmazzuk nagyobb hálózat kisebbre történő átmintázásához, a ferde vonalak és a görbék általában kissé lépcsősen eltolódva jelennek meg.
Bizonyos adatok elveszhetnek, ill. mások megduplázódhatnak.
Folyamatos lineáris objektumok (utak, vízfolyások) töredezetten, szakaszosan jelenhetnek meg.
* Bilineáris interpoláció - a környező négy pixel intenzitás értékeiből bilineáris interpolációval számítjuk az output értéket.
* Köbös konvolúció (cubic convolution) - kétváltozós, harmadfokú polinomot illesztünk a pont 4x4-es környezetére.
Koordináta transzformáció térkép a térképhez illesztés esetén
*A térképek síkvetületi rendszerének megváltoztatása többféle ok miatt szükségessé válhat:
* Ha két különböző vetületi rendszerű térképet fedetünk egymásra.
* Ha az alapadat file vetítése nem a kívánt tulajdonságú térképet eredményezi.
* Ha egynél több vetületi zónából származó adatokkal kell dolgoznunk. Pl. UTM, vagy State Plane.
A vetület megváltoztatása geometriai átalakítás - távolság, terület, méretarány különböző lehet -, ezért a konverziós eljárásnál a pixelek átmintázása elkerülhetetlen. Az átmintázással azonban az adatok spektrális integritása sérülhet. Így nem mindig célravezető a már átmintázott adatokat újramintázni, ha az alkalmazásnál az intenzitás értékek pontossága elengedhetetlen. Ha az eredeti transzformálatlan adatokkal dolgozunk, általában jobban tesszük, ha már eleve a kívánt (másodlagos) térképi vetülethez transzformáljuk az adatainkat, minthogy a transzformált adatok újabb (második) átmintázásával az adatok egy "generációját" elveszítsük.
A vektoros térképi koordináták transzformációja lényegesen egyszerűbb, mint a raszteres adatoké, mivel a vektoradatok pontkoordinátáit a megfelelő formula segítségével egyszerűen transzformálhatjuk.